

correction: la bijection est comme une fonction et sa fonction de points dans A et leurs correspondant dans B. Moi « de points » et non des points ou d’un point car il s’agit d’évaluer par efficacité du code la projection d’un élément graphique (ici un visage) sur un modèle ou un autre élément.
Je travaille avec enthousiasme sur ce problème depuis mai.
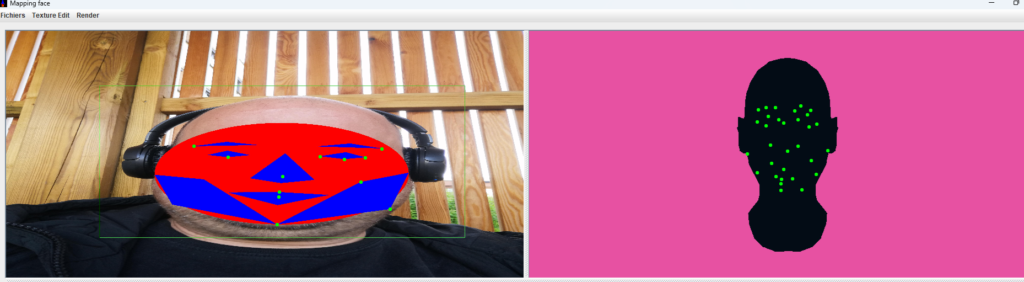
J’ai fait une reconnaissance faciale d’un portrait de moi, ajouté les points fiduciaire (en vert) puis j’ai exporté ces points vers un fichier TXT.
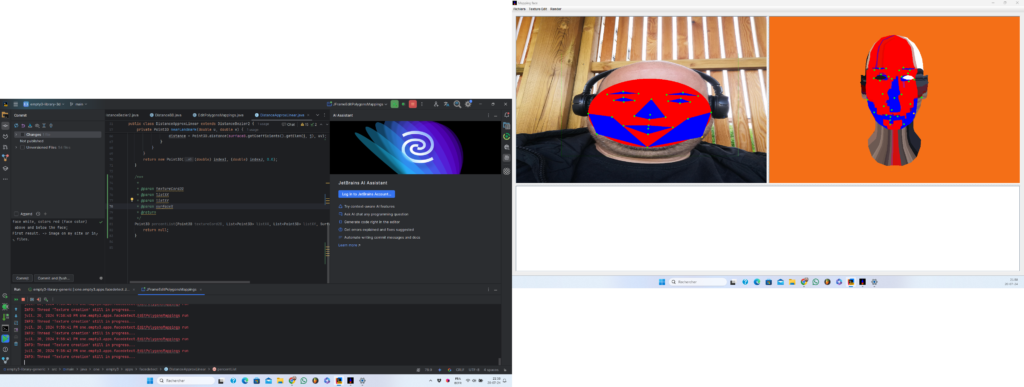
Mon interface avec l’OBJ et les points fiduciaires me permet choisir par déplacement dans le modèle de sélectionner les points correspondants.
Maintenant je cherche la méthode.. ce n’est pas si facile mais je suis enthousiaste à finir cette étape dans mon travail et de pouvoir publier une version de ma géniale bibliothèque java one.empty3:empty3-library-3d sur maven.org
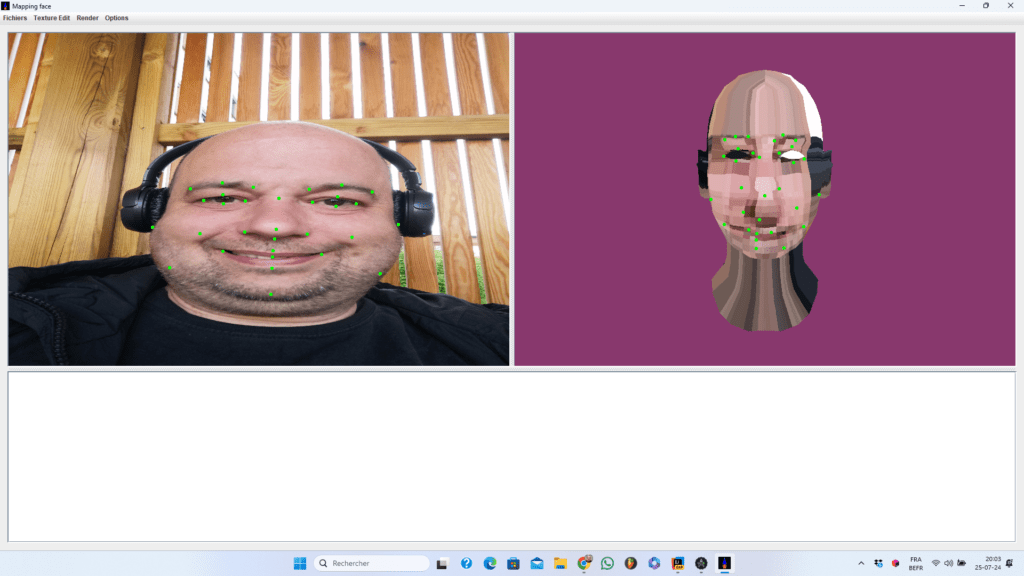
Une solution première (20-07-2024), par méthode de coordonnées (u,v)
Déplacement de points avec leur coord le long de deux grilles, la grille b avec les coordonnées des points caractéristiques de l’objet .Obj.
le mappage se fait par proximité (un voronoï) et dans la version que j’ai prévue avec une correspondance linéaire dans les sous-grille (pax[i], pay[i], pax[i+1], pny[i+1]
Venez essayer le lien, si vous voulez je prévois une succession de versions bêta pour achever de nouveaux développements
[]

[https://github.com/manuelddahmen/empty3_miror](https://github.com/manuelddahmen/empty3_miror)
(Gît and WebFormat source code)